
Overview
Sharding propagation uses the user-specified shardings to infer the unspecified shardings of tensors (or specific dimension of tensors). It traverses the data flow (use-def chains) of the computation graph in both directions until a fixed point is reached, i.e., the sharding can no longer change without undoing previous sharding decisions.
Propagation can be decomposed into steps. Each step involves looking at a specific operation and propagating between tensors (operands and results), based on the characteristics of that operation. Taking a matmul as an example, we would propagate between the non-contracting dimension of either lhs or rhs to the corresponding dimension of the result, or between the contracting dimension of the lhs and rhs.
The characteristics of an operation determine the connection between corresponding dimensions in its inputs and outputs, and can be abstracted as a per op sharding rule.
Without conflict resolution, a propagation step would simply propagate as much as it can while ignoring the conflicting axes; we refer to this as the (longest) compatible major sharding axes.
Detailed Design
Conflict resolution hierarchy
We compose multiple conflict resolution strategies in a hierarchy:
- User defined priorities. In
Sharding Representation, we described how
priorities can be attached to dimension shardings to allow for incremental
partitioning of the program, e.g., doing batch parallelism -> megatron ->
ZeRO sharding. This is achieved by applying propagation in iterations - at
iteration
iwe propagate all dimension shardings that have priority<=iand ignore all others. We also make sure that propagation won't override user defined shardings with lower priority (>i), even if they are ignored during previous iterations. - Operation based priorities. We propagate shardings based on the operation type. The "pass-through" operations (e.g., element-wise operations and reshape) have the highest priority, while operations with shape transformation (e.g., dot and reduce) have lower priority.
- Aggressive propagation. Propagate shardings with an aggressive strategy. The basic strategy only propagates shardings without conflicts, while the aggressive strategy resolves conflicts. Higher aggressiveness can reduce the memory footprint at the cost of potential communication.
- Basic Propagation. It is the lowest strategy of propagation in the hierarchy, that doesn't do any conflict resolution, and instead propagates axes that are compatible between all operands and results.
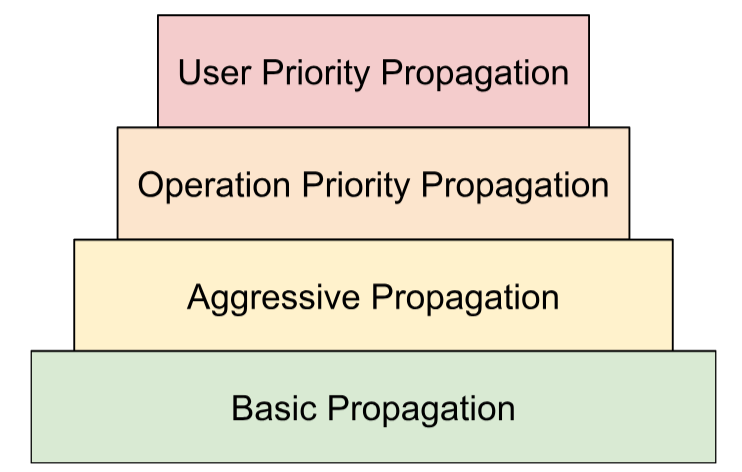
This hierarchy can be interpreted as nested for loops. For example, for each user priority, a full op-priority propagation is applied.
Operation sharding rule
The sharding rule introduces an abstraction of every operation that provides the actual propagation algorithm with the information it needs to propagate shardings from operands to results or across operands without having to reason about specific operation types and their attributes. This is essentially factoring out the op-specific logic and providing a shared representation (data structure) for all ops for the purpose of propagation only. In its simplest form, it just provides this function:
GetOpShardingRule(Operation *) -> OpShardingRuleAttr
The rule allows us to write the propagation algorithm only once in a generic way
that is based on this data structure (OpShardingRule), instead of replicating
similar pieces of code across many ops, vastly reducing the possibility for bugs
or inconsistent behavior across ops.
Let's go back to the matmul example.
An encoding that encapsulates the information needed during propagation, i.e., the relations between dimensions, can be written in the form of einsum notation:
(i, k), (k, j) -> (i, j)
In this encoding, every dimension is mapped to a single factor.
How propagation uses this mapping: If a dimension of an operand/result is sharded along an axis, propagation will lookup the factor of that dimension in this mapping, and shard other operands/results along their respective dimension with the same factor – and (subject to the earlier discussion about replication) potentially also replicate other operands/results that don't have that factor along that axis.
Compound factors: extending the rule for reshapes
In many ops, e.g., matmul, we only need to map each dimension to a single factor. However, it is not enough for reshapes.
The following reshape merges two dimensions into one:
%out = stablehlo.reshape(%in) : (tensor<2x4x32xf32>) -> tensor<8x32xf32>
Here, both dimensions 0 and 1 of the input correspond to dimension 0 of the output. Say we start by giving factors to the input:
(i,j,k) : i=2, j=4, k=32
You can see that if we want to use the same factors for the output, we would need a single dimension to reference multiple factors:
(i,j,k) -> ((ij), k) : i=2, j=4, k=32
The same can be done if the reshape were to split a dimension:
%out = stablehlo.reshape(%in) : (tensor<8x32xf32>) -> tensor<2x4x32xf32>
Here,
((ij), k) -> (i,j,k) : i=2, j=4, k=32
The dimension of size 8 here is essentially composed of the factors 2 and 4,
which is why we are calling the factors (i,j,k) factors.
These factors can also work with cases where there is no full dimension that corresponds to one of the factors:
%out = stablehlo.reshape(%in) : (tensor<8x4xf32>) -> tensor<2x16xf32>
// ((ij), k) -> (i,(jk)) : i=2, j=4, k=4
This example also emphasizes why we need to store the factor sizes - since we can't easily deduce them from the corresponding dimensions.
Core Propagation Algorithm
Propagate shardings along factors
In Shardy, we have the hierarchy of tensors, dimensions, and factors. They
represent data at different levels. A factor is a sub-dimension. It is an
internal hierarchy used in sharding propagation. Each dimension may correspond
to one or more factors. The mapping between dimension and factor is defined by
OpShardingRule.

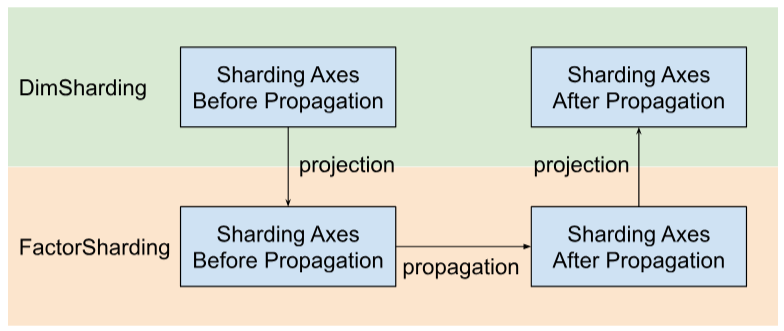
Shardy propagates sharding axes along factors instead of dimensions. To do that, we have three steps as shown in the figure below:
- Project
DimShardingtoFactorSharding - Propagate sharding axes in the space of
FactorSharding - Project the updated
FactorShardingto get the updatedDimSharding
Visualization of Sharding Propagation Along Factors
We will use the following table to visualize the sharding propagation problem and algorithm.
| F0 | F1 | F2 | Explicitly replicated axes | |
|---|---|---|---|---|
| T0 | ||||
| T1 | ||||
| T2 |
- Each column represents a factor. F0 means the factor with index 0. We propagate shardings along factors (columns).
- Each row represents a tensor. T0 refers to the tensor with index 0. Tensors are all operands and results involved for a specific operation. The axes in a row cannot overlap. An axis (or sub-axis) cannot be used to partition one tensor many times. If an axis is explicitly replicated, we cannot use it to partition the tensor.
Thus, each cell represents a factor sharding. A factor can be missing in partial
tensors. The table for C = dot(A, B) is below. The cells containing an N
imply that the factor is not in the tensor. For example, F2 is in T1 and T2, but
not in T0.
C = dot(A, B) |
F0 Batching dim | F1 Non-contracting dim | F2 Non-contracting dim | F3 Contracting dim | Explicitly replicated axes |
|---|---|---|---|---|---|
| T0 = A | N | ||||
| T1 = B | N | ||||
| T2 = C | N |
Collect and propagate sharding axes
We use a simple example shown below to visualize the propagation.
| F0 | F1 | F2 | Explicitly replicated axes | |
|---|---|---|---|---|
| T0 | "a" | "f" | ||
| T1 | "a", "b" | "c", "d" | "g" | |
| T2 | "c", "e" |
Step 1. Find axes to propagate along each factor (a.k.a. the (longest)
compatible major sharding axes). For this example, we propagate ["a", "b"]
along F0, propagate ["c"] along F1, and propagate nothing along F2.
Step 2. Expand the factor shardings to obtain the following result.
| F0 | F1 | F2 | Explicitly replicated axes | |
|---|---|---|---|---|
| T0 | "a", "b" | "c" | "f" | |
| T1 | "a", "b" | "c", "d" | "g" | |
| T2 | "a", "b" | "c", "e" |
Data flow ops
The above propagation step description applies to most ops. However, there are cases where a sharding rule is not appropriate. For those cases, Shardy defines data flow ops.
A data flow edge of some op X defines a bridge between a set of sources and a
set of targets, such that all sources and targets should be sharded in the
same way. Examples of such ops are stablehlo::OptimizationBarrierOp,
stablehlo::WhileOp, stablehlo::CaseOp and also
sdy::ManualComputationOp.
Ultimately, any op that implements
ShardableDataFlowOpInterface
is considered a data flow op.
An op can have multiple data flow edges that are orthogonal to one another. For example:
y_0, ..., y_n = while (x_0, ..., x_n)
((pred_arg_0,... , pred_arg_n) { ... })
((body_arg_0,..., body_arg_n) {
...
return return_value_0, ..., return_value_n
})
This while op has n data flow edges: the i-th data flow edges is between
sources x_i, return_value_i and targets y_i, pred_arg_i, body_arg_i.
Shardy will propagate shardings between all sources and targets of a data flow
edge as if it was a regular op with the sources as operands and targets as
results, and an identity sdy.op_sharding_rule. That means that forward
propagation is from sources to targets and backwards propagation is from targets
to sources.
Several methods must be implemented by the user describing how to get the sources and targets of each data flow edge through their owner, and also how to get and set the shardings of edge owners. An owner is a user-specified target of the data flow edge used by Shardy's propagation. The user can choose it arbitrarily but it needs to be static.
For example, given the custom_op defined below:
y_1, ..., y_n = custom_op (x_1, ..., x_n)
((body_arg_1,..., body_arg_n) {
...
return return_value_1, ..., return_value_n
})
This custom_op has two types for data flow edges: n edges each between
return_value_i (sources) and y_i (targets) and n edges between x_i
(sources) and body_arg_i (targets). In this case, the edge owners are the same
as the targets.