
背景
分割表示法的目的,是針對一組可用裝置指定張量的分割方式。
分割表示法可以是:
- 使用者手動指定的輸入、輸出或中間輸出項目區隔限制。
- 在分割傳播過程中,每個作業都會經過轉換。
總覽
基本結構
邏輯網格是裝置的多維度檢視畫面,由一組軸名和大小定義。
建議的分割表示法會根據名稱繫結至特定邏輯網格,且只能參照該網格中的軸名。張量的區塊劃分會指定沿著哪些軸 (特定邏輯網格) 區塊劃分張量的每個維度,以從主要到次要的順序排列。張量會沿著網格的所有其他軸複製。
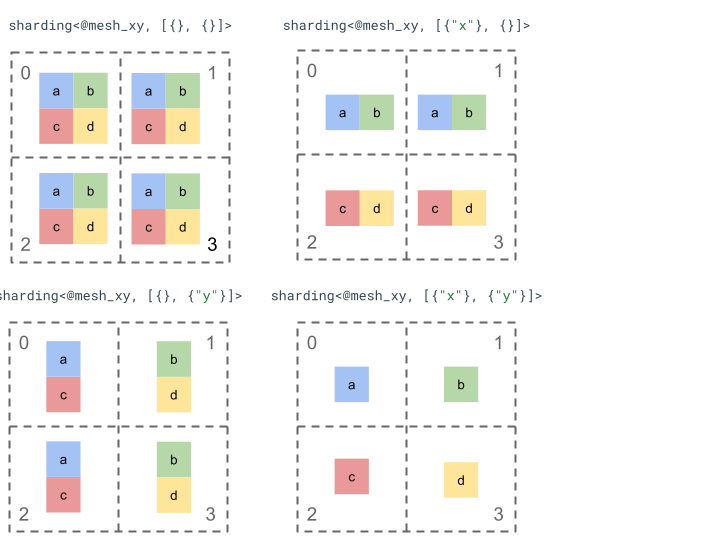
我們將以簡單的 2 階張量和 4 個裝置,探索分割表示法。
我們首先將 4 個裝置 [0, 1, 2, 3] 重塑為 2 維陣列 [[0, 1], [2,
3]],以建立具有 2 個軸線的網格:
@mesh_xy = <["x"=2, "y"=2]>
接著,我們可以將下列 2 階張量 [[a, b], [c, d]] 切割如下:
其他重要元件
- 開放/封閉維度:維度可以是開放式 (可在可用軸上進一步分割),也可以是封閉式 (固定且無法變更)。
- 明確複製的軸:所有未用於維度分片的軸都會隱含複製,但分片作業可以指定明確複製的軸,因此無法用於日後的維度分片。
- 軸分割和子軸 - 可將 (完整) 網格軸分割成多個子軸,這些子軸可分別用於分割維度或明確複製。
- 多個邏輯網格:不同的分割作業可以繫結至不同的邏輯網格,這些網格可以有不同的軸,甚至邏輯裝置 ID 的順序也可能不同。
- 優先順序:為了逐步分割程式,您可以將優先順序附加至維度分割,以決定在整個模組中,每個維度分割限制的傳播順序。
- 維度分割可分性:維度可在大小乘積不除以維度大小的軸上分割。
縝密設計
我們會在本節中擴充基本結構和每個重要元件。
基本結構
維度分割作業會告訴我們,張量的每個維度沿著哪些軸 (或子軸) 從主要分割到次要分割。所有未分割維度的其他軸都會隱含複製 (或明確複製)。
我們將從簡單範例開始,並在說明其他功能時擴充範例。
@mesh_xy = <["x"=2, "y"=4, "z"=2]>
// The 1st tensor dimension is sharded along axis "x" and the 2nd tensor dimension is
// sharded along axis "z" then further along axis "y". The local shape of this tensor (i.e. the shape on a single device), would be tensor<2x1xf32>.
sharding<@mesh_xy, [{"x"}, {"z", "y"}]> : tensor<4x8xf32>
不變量
- 維度切割數量必須與張量的秩相符。
- 所有軸名稱都必須存在於參照的網格中。
- 軸或子軸只能在區隔表示法中出現一次 (每個軸都會區隔一個維度,或明確複製)。
開放/封閉維度
張量的每個維度都可以是開放或封閉。
開啟
開放式維度可供傳播,以便進一步沿著其他軸切割,也就是說,指定的維度切割不一定是該維度的最終切割。這與 GSPMD 的 unspecified_dims 類似 (但不完全相同)。
如果維度是開放的,我們會在維度已分割的軸後方新增 ? (請參閱下方範例)。
已關閉
封閉維度是指無法透過傳播來進一步分割的維度,也就是說,指定的維度分割是該維度的最終分割,且無法變更。這項功能的常見用途是 GSPMD 通常不會修改模組的輸入/輸出引數,或是在 jax.jit 中,使用者指定的 in_shardings 是靜態的,因此無法變更。
我們可以擴充上述範例,以便使用開放式維度和封閉式維度。
@mesh_xy = <["x"=2, "y"=4, "z"=2]>
// The 1st dimension is closed, therefore it can't be further sharded and {"x"}
// will remain its sharding. The 2nd dimension is open, and can therefore be
// further sharded during propagation, e.g. by "y".
sharding<@mesh_xy, [{"x"}, {"z", ?}]> : tensor<4x8xf32>
明確複製的軸
要複製張量的明確軸集。雖然可以判斷未在軸上分割的張量會在該軸上隱含複製 (例如今天的 jax.sharding.PartitionSpec),但明確指定這項資訊可確保傳播無法使用這些軸,進一步透過這些軸分割開放維度。透過隱含複製功能,張量可以進一步分割。但在明確複製的情況下,沒有任何東西可以沿著該軸分割張量。
重複的軸順序不會影響張量的資料儲存方式。但為了保持一致性,軸會依照頂層網格中指定的順序儲存。舉例來說,如果網格是:
@mesh_xy = <["c"=2, "a"=2, "b"=2]>
我們希望明確複製軸 "a" 和 "c",因此順序應為:
replicated={"c", "a"}
我們可以擴充上述範例,明確複製軸。
@mesh_xyz = <["x"=2, "y"=4, "z"=2]>
// Since "y" is explicitly replicated, it can't be used to shard the 2nd
// dimension that is open. However, "z" is implicitly replicated so it can be
// used to shard that dimension. The local shape of this tensor (i.e. the
// shape on a single device), would be tensor<2x8xf32>.
sharding<@mesh_xyz, [{"x"}, {?}], replicated={"y"}> : tensor<4x8xf32>
軸分割和子軸
將裝置的 1 維陣列重新調整為 n 維陣列,即可建立 n 軸的邏輯網格,其中每個維度都會形成一個軸,並以使用者定義的名稱命名。
在編譯器中,您可以透過將網格從 [...,k,...] 重塑為 [...,k1,...,km,...],執行相同的程序,將大小為 k 的軸進一步分割成 m 子軸。
動機
為了瞭解分割軸背後的動機,我們將參考以下範例:
@mesh_x = <["x"=4]>
%arg0 : tensor<8xf32> {sdy.sharding=<@mesh_x, [{"x"}]>}
%0 = reshape %arg0 : (tensor<8xf32>) -> tensor<2x4xf32>
我們希望以避免通訊的方式分割重塑結果 (也就是保留資料所在位置)。由於 "x" 的大小大於結果的第 1 個維度,因此我們需要將軸分割成兩個子軸 "x.0" 和 "x.1",每個大小為 2,並在 "x.0" 上分割第 1 個維度,在 "x.1" 上分割第 2 個維度。
函式輸入/輸出分割
在傳播期間,主要函式的輸入或輸出可能會沿著子軸分割。這對某些架構來說可能會造成問題,因為我們無法以這種方式向使用者提供分割結果 (例如在 JAX 中,我們無法使用 jax.sharding.NamedSharding 表示子軸)。
我們有幾種處理這類案件的方式:
- 允許並以不同格式傳回分割作業 (例如
jax.sharding.PositionalSharding,而非 JAX 中的jax.sharding.NamedSharding)。 - 禁止,以及會分割輸入/輸出的 all-gather 子軸。
目前,我們允許在傳播管道中對輸入/輸出內容使用子軸。如要瞭解如何停用這項功能,請告訴我們。
代表權
我們可以根據名稱參照網格中的特定完整軸,同樣地,我們也可以根據大小和左側所有子軸 (同軸名稱) 大小的乘積參照特定子軸。
如要從大小為 n 的完整軸 "x" 中擷取大小為 k 的特定子軸,我們會有效地將大小為 n (在網格中) 的大小轉換為 [m, k, n/(m*k)],並使用第 2 個維度做為子軸。因此,子軸可以由兩個數字 m 和 k 指定,我們使用以下簡潔的符號表示子軸:"x":(m)k。
m>=1是這個子軸的預先大小 (m應為n的除數)。預先大小是這個子軸左側所有子軸大小 (對應於這個子軸) 的乘積 (如果等於 1,表示沒有任何子軸;如果大於 1,則對應於一個或多個子軸)。k>1是此子軸的實際大小 (k應為n的除數)。n/(m*k)是後端大小。這個值是這個子軸右側 (次要於此子軸) 的所有子軸大小相乘 (如果等於 1,表示沒有任何子軸;如果大於 1,則對應於單一或多個子軸)。
不過,使用特定子軸 "x":(m)k 時,其他子軸的數量不會有所差異,如果不分割維度或明確複製,則不需要在張量分割中參照任何其他子軸。
回到「動機」一節的範例,我們可以將結果分割如下:
@mesh_x = <["x"=4]>
%arg0 : tensor<8xf32> {sdy.sharding=<@mesh_x, [{"x"}]>}
%0 = reshape %arg0 {sdy.sharding_per_value=<[<@mesh_x, [{"x":(1)2}, {"x":(2)2}]>]>}
: (tensor<8xf32>) -> tensor<2x4xf32>
以下是另一個分割軸的範例,其中只使用了部分子軸。
@mesh_xyz = <["x"=2, "y"=8, "z"=2]>
// Axis "y" is effectively split into 3 sub-axes denoted as
// "y":(1)2, "y":(2)2, "y":(4)2
// in order, but only "y":(2)2 is used, to shard the 2nd dimension. The local
// shape of this tensor (i.e. the shape on a single device), would be
// tensor<2x4xf32>.
sharding<@mesh_xyz, [{"x"}, {"y":(2)2}]> : tensor<4x8xf32>
同樣地,以下兩個分割方式在語意上是等價的。我們可以將 mesh_xy 視為 mesh_full 的拆分。
@mesh_full = <"devices"=8>
@mesh_xy = <"x"=4, "y"=2>
sharding<@mesh_xy, [{"x"},{ "y"}]> : tensor<4x4xf32>
sharding<@mesh_full, [{"devices":(1)4}, {"devices":(4)2}]> : tensor<4x4xf32>
明確複製的子軸
除了用於分割維度的子軸之外,也可以將子軸標示為明確複製的軸。我們允許在表示法中執行這項操作,因為子軸的行為與完整軸相同,也就是說,當您沿著軸 "x" 的子軸分割維度時,"x" 的其他子軸會隱含複製,因此可以明確複製,以表示子軸必須保持複製狀態,且無法用於分割維度。
例如:
@mesh_xyz = <["x"=2, "y"=8, "z"=2]>
// Sub-axis "y":(1)2 is explicitly replicated and "y":(4)2 is implicitly replicated.
sharding<@mesh_xyz, [{"x"}, {"y":(2)2}], replicated={"y":(1)2}> : tensor<4x8xf32>
相同完整軸的複製子軸應依預先大小遞增排序,例如:
replicated={"y":(4)2, "x", "y":(1)2} ~> replicated={"x", "y":(1)2, "y":(4)2}
不變量
張量切割中參照的子軸不得重疊,例如
"x":(1)4和"x":(2)4重疊。張量切割中參照的子軸必須盡可能大,也就是說,如果維度切割有兩個相鄰的子軸 A 和 B,或子軸 A 和 B 明確複製,則這些子軸不得連續,例如
"x":(1)2和"x":(2)4,因為這些子軸可以用單一"x":(1)8取代。
多個邏輯網格
一個邏輯網格是裝置的多維檢視畫面。我們可能需要多個裝置檢視畫面來代表分割作業,尤其是針對任意裝置指派作業。
例如,jax.sharding.PositionalSharding 沒有一個通用的邏輯網格。GSPMD 目前透過 HloSharding 支援這項功能,其中的呈現方式可以是裝置和維度大小的排序清單,但無法透過上述軸分割呈現。
我們在程式的頂層定義多個邏輯網格,藉此克服這項限制並處理現有的邊緣情況。每個網格可以有不同數量的軸,且名稱也不同,並且可為相同組裝置隨意指派,也就是說,每個網格都會參照相同組裝置 (透過其專屬邏輯 ID),但會以任意順序排列,類似於 GSPMD 表示法。
每個分割表示法都會連結至特定邏輯網格,因此只會參照該網格中的軸。
指派給一個邏輯網格的張量,可由指派給不同網格的運算子使用,方法是簡單地重新切割張量,以符合目的地網格。在 GSPMD 中,這通常是解決相衝突的網格問題的方法。
使用者可以指定多個具有不同軸名 (例如透過 jax.sharding.NamedSharding) 且裝置順序相同的多個網格。請參考以下範例,<@mesh_0, "b"> 與 <@mesh_1, "z"> 相同:
@mesh_0 = {<["a"=4, "b"=2]>, device_ids=[0, 1, 2, 3, 4, 5, 6, 7]}
@mesh_1 = {<["x"=2, "y"=2, "z"=2]>, device_ids=[0, 1, 2, 3, 4, 5, 6, 7]}
優先順序
優先順序可用於將特定分割和傳播決策優先於其他決策,並允許逐步分割程式。
優先順序是附加至分割表示法中部分或所有維度的值 (複製的軸沒有優先順序)。
例如:
@mesh_xy = <["w"=6, "x"=2, "y"=4, "z"=2]>
// |-> y is implicitly p0
%arg4 : sharding<@mesh_xy, [{"x"}p1, {"y"}, {"z",?}p2], replicated={} }>
優先順序可讓使用者更精細地控制傳播作業,例如先進行批次並行作業,然後再執行 megatron,最後再進行 ZeRO 分割作業。這可讓您確保分割的內容,並透過更精細的分割策略,讓程式更容易進行偵錯 (可查看在單獨的 megatron 中,程式會如何顯示)。
我們允許為每個維度分割作業附加優先順序 (預設為 0),這表示優先順序為 <i 的所有分割作業會先傳播至整個程式,再傳播優先順序為 i 的作業。
即使切割作業含有優先順序較低的開放式維度 (例如{"z",?}p2,在傳播期間不會遭到優先順序較高的其他張量切割作業覆寫。不過,在所有優先順序較高的分割作業完成後,這類開放維度可進一步分割。
換句話說,優先順序「不是」NOT關於哪個維度分割作業比其他作業更重要,而是指應將不同維度分割作業群組傳播至整個程式的順序,以及如何解決中間未註解的張量衝突。
不變量
優先順序從 0 (最高優先順序) 開始,並依序增加 (為了讓使用者輕鬆新增及移除優先順序,我們允許優先順序之間有空格,例如使用 p0 和 p2,但不使用 p1)。
空白的封閉維度區隔 (即
{}) 不應有優先順序,因為這不會產生任何效果。
維度分割的可分性
大小為 d 的維度可能會沿著大小乘積為 n 的軸進行分割,因此 d 無法被 n 整除 (實際上需要在維度中填充資料)。
例如:
@mesh_xy = <["x"=8, "y"=2, "z"=3]>
sharding<@mesh_xy, [{"x"}, {"y"}, {"z"}]> : tensor<7x3x8xf32>
文法
每個邏輯網格定義如下:
@mesh_name = <mesh_axis_1,...,mesh_axis_n>
mesh_axis ::= axis_name=axis_size
axis_name ::= str
axis_size ::= int
對於秩序為 r 的張量,分割表示法會有下列結構:
sharding<@mesh_name, dim_shardings, replicated=replicated_axes}
mesh_name ::= str
dim_shardings ::= [dim_sharding_1,...,dim_sharding_r]
replicated_axes ::= {axis_1,...,axis_m}
dim_sharding ::=
{axis_1,...,axis_k} | // closed dimension
{axis_1,...,axis_k,?} // open dimension
axis ::=
axis_name | // a full axis
sub_axis // a sub axis
axis_name ::= str
sub_axis ::= axis_name:(pre_size)size
pre_size ::= int
size ::= int