
Omówienie
Propagowanie podziału na fragmenty wykorzystuje określone przez użytkownika podziały na fragmenty, aby wywnioskować nieokreślone podziały na fragmenty tensorów (lub określony wymiar tensorów). Przechodzi przez przepływ danych (łańcuchy use-def) w grafice obliczeń w obu kierunkach, aż do osiągnięcia punktu stałego, czyli momentu, w którym podział nie może się już zmienić bez cofnięcia poprzednich decyzji dotyczących podziału.
Propagację można podzielić na etapy. Każdy krok polega na rozpatrywaniu konkretnej operacji i przekazywanie informacji między tensorami (operandami i wynikami) w zależności od charakterystyki tej operacji. Na przykład w przypadku funkcji matmul propagujemy wymiar niekurczący ani lewej ani prawej strony na odpowiedni wymiar wyniku lub na wymiar kurczący lewej ani prawej strony.
Charakterystyka operacji określa związek między odpowiednimi wymiarami na wejściu i wyjściu, a można ją zastosować jako regułę podziału na operację.
Bez rozwiązywania konfliktów propagacja odbywałaby się w największym możliwym zakresie, ignorując sprzeczne osie. Nazywamy to (najdłuższymi) zgodnymi głównymi osiami podziału.
Szczegółowy projekt
Hierarchia rozwiązywania konfliktów
W hierarchii tworzymy wiele strategii rozwiązywania konfliktów:
- Priorytety zdefiniowane przez użytkownika. W sekcji Reprezentacja podziału na części opisaliśmy, jak można przypisywać priorytety podziałom wymiarów, aby umożliwić stopniowe dzielenie programu na części, np. stosowanie równoległości zbiorczej –> megatron –> podział na części ZeRO. Osiągamy to, stosując propagowanie w iteracjach – w iteracji
ipropagujemy wszystkie podziały wymiaru, które mają priorytet<=i, i ignorujemy wszystkie pozostałe. Dbamy też o to, aby propagowanie nie zastępowało podziału definiowanego przez użytkownika o niższym priorytecie (>i), nawet jeśli jest on ignorowany w poprzednich iteracjach. - Priorytety operacyjne. Rozprowadzenie dzielenia na części odbywa się na podstawie typu operacji. Operacje „przepuszczania” (np. operacje element po elemencie i przekształcanie kształtu) mają najwyższy priorytet, a operacje z przekształceniem kształtu (np. dot i reduce) – niższy.
- Agresywna propagacja. Rozpowszechniaj podziały za pomocą agresywnej strategii. Strategia podstawowa rozpowszechnia tylko podziały bez konfliktów, a strategia agresywna rozwiązuje konflikty. Większa agresywność może zmniejszyć zapotrzebowanie na pamięć kosztem potencjalnej komunikacji.
- Podstawowa propagacja. Jest to strategia propagowania o najniższej priorytecie w hierarchii, która nie rozwiązuje konfliktów, lecz propaguje osie, które są zgodne ze wszystkimi operandami i wynikami.
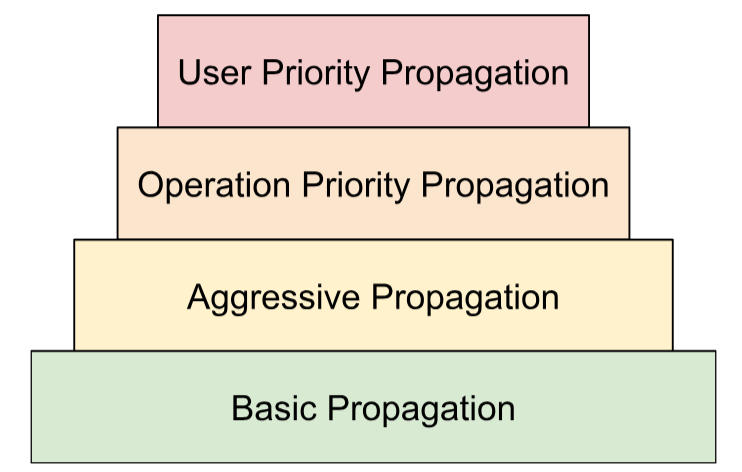
Tę hierarchię można interpretować jako zagnieżdżone pętle for. Na przykład w przypadku każdego priorytetu użytkownika stosuje się pełną propagację priorytetu op.
Reguła podziału operacji
Zasada podziału wprowadza abstrakcję każdej operacji, która dostarcza rzeczywistemu algorytmowi propagacji informacji potrzebnych do propagowania podziału od operandów do wyników lub między operandami bez konieczności uwzględniania konkretnych typów operacji i ich atrybutów. Polega to zasadniczo na wyodrębnieniu logiki związanej z konkretną operacją i zapewnieniu wspólnej reprezentacji (struktury danych) dla wszystkich operacji tylko na potrzeby propagowania. W najprostszej formie ma ona tylko tę funkcję:
GetOpShardingRule(Operation *) -> OpShardingRuleAttr
Dzięki tej regule możemy napisać algorytm propagacji tylko raz w ogólnym formacie, który opiera się na tej strukturze danych (OpShardingRule), zamiast powielać podobne fragmenty kodu w wielu operacjach, co znacznie zmniejsza prawdopodobieństwo wystąpienia błędów lub niespójności w operacjach.
Wróćmy do przykładu matmul.
Kodowanie, które zawiera informacje potrzebne podczas propagacji, czyli relacje między wymiarami, może być zapisane w formie zapisu einsum:
(i, k), (k, j) -> (i, j)
W tym kodowaniu każdy wymiar jest mapowany na jeden czynnik.
Jak propagacja używa tego mapowania: jeśli wymiar operandu lub wyniku jest podzielony na fragmenty wzdłuż osi, propagacja wyszuka współczynnik tej osi w tym mapowaniu i podzieli inne operandy lub wyniki wzdłuż ich wymiaru z tym samym współczynnikiem – a także (zgodnie z wcześniejszą dyskusją na temat replikowania) potencjalnie też powieli inne operandy lub wyniki, które nie mają tego współczynnika wzdłuż tej osi.
Czynniki złożone: rozszerzenie reguły dotyczącej zmian kształtu
W wielu operacjach, np. matmul, wystarczy zmapować każdy wymiar na jeden czynnik. Nie wystarczy jednak do zmiany kształtu.
Ta operacja zmiany kształtu łączy 2 wymiary w jeden:
%out = stablehlo.reshape(%in) : (tensor<2x4x32xf32>) -> tensor<8x32xf32>
W tym przykładzie oba wymiary 0 i 1 na wejściu odpowiadają wymiarowi 0 na wyjściu. Załóżmy, że zaczynamy od podania czynników wejściowych:
(i,j,k) : i=2, j=4, k=32
Jeśli chcemy, aby w wyniku były używane te same czynniki, potrzebujemy 1 wymiaru, który będzie się odwoływał do wielu czynników:
(i,j,k) -> ((ij), k) : i=2, j=4, k=32
To samo można zrobić, jeśli przekształcenie ma podzielić wymiar:
%out = stablehlo.reshape(%in) : (tensor<8x32xf32>) -> tensor<2x4x32xf32>
Here,
((ij), k) -> (i,j,k) : i=2, j=4, k=32
Wymiar o wielkości 8 składa się głównie z czynników 2 i 4, dlatego nazywamy je czynnikami (i,j,k).
Te czynniki mogą też działać w przypadkach, gdy nie ma pełnego wymiaru odpowiadającego jednemu z tych czynników:
%out = stablehlo.reshape(%in) : (tensor<8x4xf32>) -> tensor<2x16xf32>
// ((ij), k) -> (i,(jk)) : i=2, j=4, k=4
Ten przykład pokazuje też, dlaczego musimy przechowywać rozmiary czynników, ponieważ nie możemy ich łatwo wywnioskować z odpowiednich wymiarów.
Główny algorytm propagacji
Propagowanie podziału na czynniki
W Shardy mamy hierarchię tensorów, wymiarów i czynników. Odpowiadają one za dane na różnych poziomach. Czynnik to podwymiar. Jest to wewnętrzna hierarchia używana w propagacji podziału. Każdy wymiar może odpowiadać co najmniej 1 czynnikowi. Mapowanie wymiaru na czynnik definiuje parametr OpShardingRule.

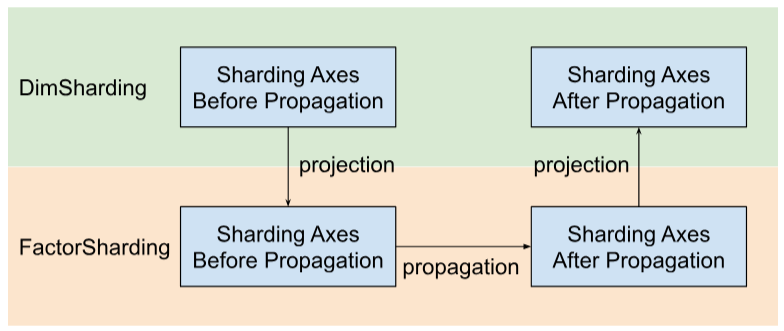
Shardy rozpowszechnia osie podziału wzdłuż czynników zamiast wymiarów. Aby to zrobić, wykonaj 3 podstawowe kroki:
- Projekt
DimShardingdoFactorSharding - Propagowanie osi podziału w przestrzeni
FactorSharding - Wyświetl zaktualizowany projekt
FactorSharding, aby uzyskać zaktualizowany projektDimSharding
Wizualizacja propagacji podziału na części na tle czynników
Aby zilustrować problem i algorytm propagacji fragmentacji, użyjemy tej tabeli.
| F0 | F1 | F2 | Wyraźnie powielane osie | |
|---|---|---|---|---|
| T0 | ||||
| T1 | ||||
| T2 |
- Każda kolumna odpowiada jednemu czynnikowi. F0 oznacza czynnik o indeksie 0. Rozprowadzimy dzielenie na czynniki (kolumny).
- Każdy wiersz reprezentuje tensor. T0 odnosi się do tensora o indeksie 0. Tensory to wszystkie operandy i wyniki zaangażowane w konkretną operację. Osie w wierszu nie mogą się pokrywać. Osi (ani podosi) nie można używać do wielokrotnego dzielenia jednego tensora. Jeśli oś jest wyraźnie powielana, nie możemy jej użyć do podziału tensora.
W związku z tym każda komórka reprezentuje podział czynnika. W przypadku tensorów częściowych może brakować czynnika. Tabela C = dot(A, B) znajduje się poniżej. Komórki zawierające wartość N wskazują, że czynnik nie występuje w tensorze. Na przykład F2 znajduje się w T1 i T2, ale nie w T0.
C = dot(A, B) |
F0 Grupowanie przyciemnienia | F1 Niewypełnianie umowy | F2 Niezwężenie przyciemnienia | F3 Contracting dim | Wyraźnie powielane osie |
|---|---|---|---|---|---|
| T0 = A | N | ||||
| T1 = B | N | ||||
| T2 = C | N |
Pobieranie i rozpowszechnianie osi podziału
Aby zilustrować propagację, posłużymy się prostym przykładem przedstawionym poniżej.
| F0 | F1 | F2 | Wyraźnie powielane osie | |
|---|---|---|---|---|
| T0 | „a” | „f” | ||
| T1 | „a”, „b” | „c”, „d” | „g” | |
| T2 | „c”, „e”. |
Krok 1. Znajdź osie, które mają być propagowane wzdłuż każdego czynnika (czyli zgodne z głównymi osiami podziału). W tym przykładzie propagujemy ["a", "b"] wzdłuż krawędzi F0, propagujemy ["c"] wzdłuż krawędzi F1, a nic nie propagujemy wzdłuż krawędzi F2.
Krok 2. Rozwiń podział czynników, aby uzyskać ten wynik.
| F0 | F1 | F2 | Wyraźnie powielane osie | |
|---|---|---|---|---|
| T0 | "a", "b" | „c” | „f” | |
| T1 | „a”, „b” | „c”, „d” | „g” | |
| T2 | „a”, „b” | „c”, „e”. |
Operacje przepływu danych
Powyższy opis propagowania dotyczy większości operacji. Są jednak przypadki, w których reguła podziału na części nie jest odpowiednia. W takich przypadkach Shardy definiuje operacje przepływu danych.
Krawędzia przepływu danych w operacji X definiuje pomost między zbiorem źródeł a zbiorem celów, tak aby wszystkie źródła i cele były dzielone w taki sam sposób. Przykładami takich operacji są stablehlo::OptimizationBarrierOp, stablehlo::WhileOp, stablehlo::CaseOp i sdy::ManualComputationOp.
Ostatecznie każda operacja, która implementuje interfejs ShardableDataFlowOpInterface, jest uznawana za operację przepływu danych.
Operacja może mieć wiele krawędzi przepływu danych, które są do siebie prostopadłe. Przykład:
y_0, ..., y_n = while (x_0, ..., x_n)
((pred_arg_0,... , pred_arg_n) { ... })
((body_arg_0,..., body_arg_n) {
...
return return_value_0, ..., return_value_n
})
Ta operacja while ma n krawędzie przepływu danych: i-ta krawędź przepływu danych znajduje się między źródłami x_i i return_value_i oraz celami y_i, pred_arg_i i body_arg_i.
Shardy rozpropaguje podziały między wszystkimi źródłami i miejscami docelowymi krawędzi przepływu danych tak, jakby były to zwykłe operacje ze źródłami jako operandami i miejscami docelowymi jako wynikami oraz tożsamością sdy.op_sharding_rule. Oznacza to, że propagacja w przód odbywa się ze źródeł do miejsc docelowych, a propagacja wsteczna – z miejsc docelowych do źródeł.
Użytkownik musi zaimplementować kilka metod opisujących, jak uzyskać źródła i docelowe krawędzie przepływu danych za pomocą ich właściciela, a także jak pobrać i ustawić podziały właścicieli krawędzi. Właściciel to określony przez użytkownika cel krawędzi przepływu danych używanej przez mechanizm propagacji Shardy. Użytkownik może wybrać dowolny kolor, ale musi być on statyczny.
Na przykład, jeśli custom_op jest zdefiniowany w ten sposób:
y_1, ..., y_n = custom_op (x_1, ..., x_n)
((body_arg_1,..., body_arg_n) {
...
return return_value_1, ..., return_value_n
})
Ta operacja niestandardowa ma 2 typy krawędzi przepływu danych: n krawędzi między return_value_i (źródłami) a y_i (docelami) oraz n krawędzi między x_i (źródłami) a body_arg_i (docelami). W tym przypadku właściciele krawędzi są identyczni z docelami.